中文 English
公司简介 新闻资讯
沧蓝 逐陆 天巡 隧途 星智
电力电网 智慧交通 智算中心 数字城域 海洋水利
China / 中文 Global / English
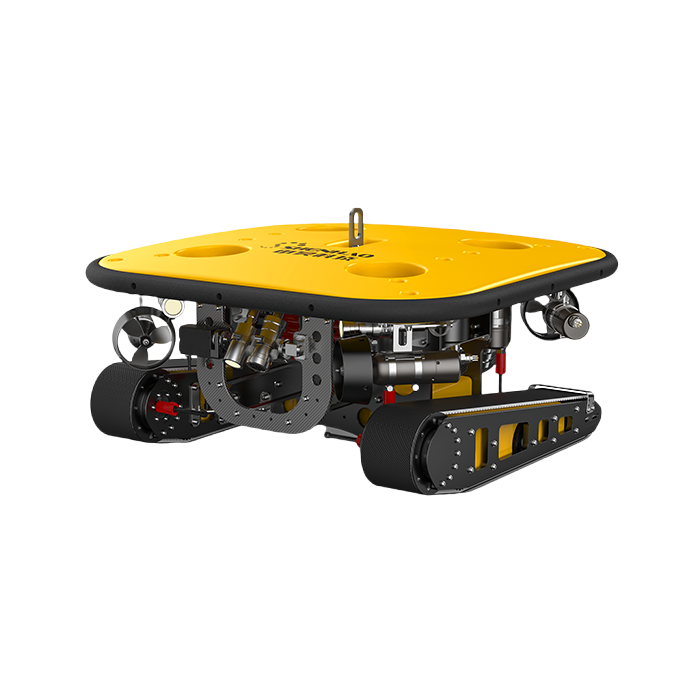
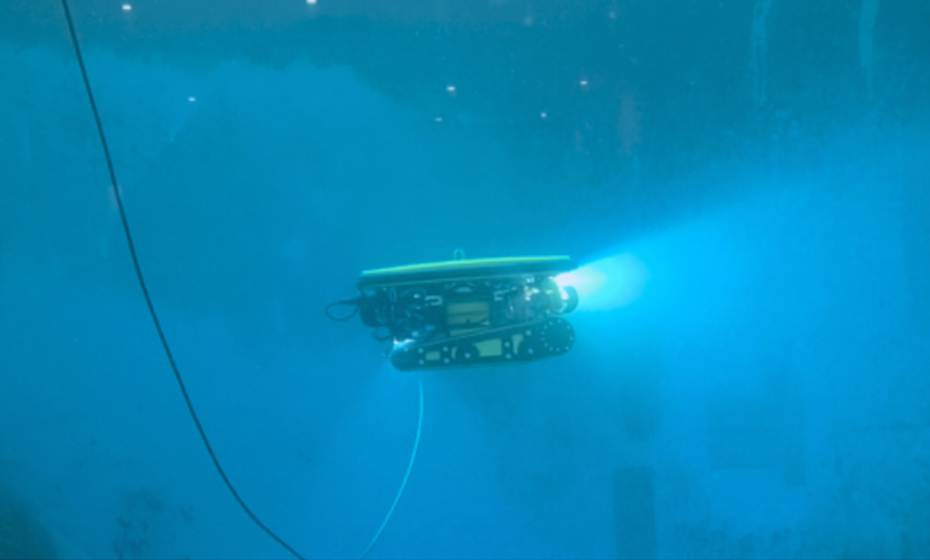
声学成像
光学成像
水下清洗
定姿航行
爬行作业
超声检测














 language
language